
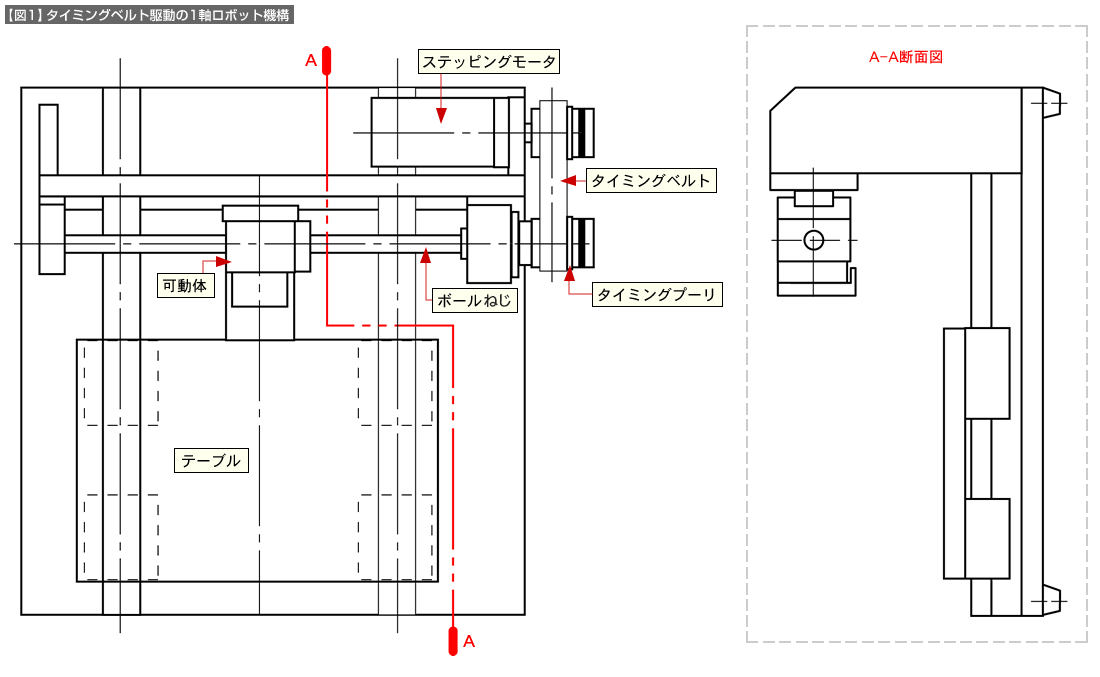
ここでは、小型・安価でモータの使い方が簡単なステッピングモータとタイミングベルトを採用した1軸ロボット(【図1】参照)を例に、ステッピングモータの必要精度を解説します。
(1)モータに必要な回転精度の算出
モータの回転運動を直進運動に置き換える機構の場合、直進運動機構に必要な位置決め精度と、それを制御するためのモータの回転精度の関係は次式で算出できます。

この式は、直進方向に必要な位置決め精度と、360度の角度に必要な回転精度に置き換えたもので、【図2】の関係が解れば理解しやすくなります。
(2)事例
1.タイミングベルトとプーリの選定候補を下の枠内とすると、
直進運動の必要位置決め精度A=±0.1mmとした場合
![]()
となります。
2.ボールねじを採用した場合
上記のモータの必要精度の算出法はボールねじを採用した場合も利用できます。上の算出式のPがプーリのリードピッチからボールねじのリードピッチに変更すればよい。