
LCA(ローコストオートメーション)メカニズムの正確な運動や位置決め、サイクルタイムの短縮には、起動から停止までの一連の運動をより高速化しなければなりません。併せて滑らかでぎこちなさのない静かなメカニズムの選定が必要です。そのためには、各種の運動の特徴とそれらの運動を実現させるメカニズムを理解しておくことが重要です。ここでは運動の種類と関連する機構を解説します。なお、実際のLCAでは複数個の運動がお互いに連なって機構を構成します。
運動の種類:慣性の取り扱いが容易なことから、原動側の運動形態のほとんどは回転運動です。
| 1. | [連続]と[間欠] | |
| 2. | [直線]と[曲線] | |
| 3. | [往復]と[回転] | |
| 4. | [平面]と[立体] | |
| 5. | [等速]と[不等速] | |
| 6. | [等加速]と[不等加速] | |
| 7. | [可逆]と[不可逆] | |
| 8. | [変速] | |
| 9. | [平行] | |
| 10. | [比例] | |
| 11. | [倍力] | |
| 12. | [複合] |
LCAメカニズムで多用される運動の種類と、それらを実現する機構の例を示します。
|
||||||||||||||||||||
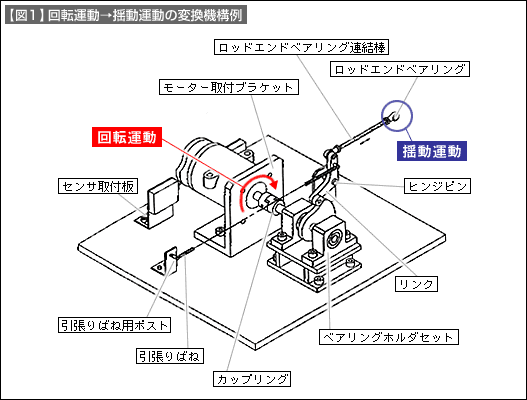
上図のLCA機構の中では、原動側モーターの回転運動をカップリングを介してカムの回転運動に換え、リンクとロッドエンドのエレメント(機素)により、複雑な揺動運動に換えたものです。