
ここでは、直進運動の原点や稼動限界の設定、ワークの有無の確認などによく使われる光電センサについて解説します。
(1)光電センサの種類と特徴
|
(2)リニアガイド機構の位置決め制御の事例
リニアガイドとボールねじの構成からなる直進運動機構の位置決め制御には、検出精度が良い溝形の光電センサが採用されます。
【写真】はX軸-Y軸の2軸ロボット機構です。X軸、Y軸それぞれに3個の溝型光電センサを取り付け直進運動を制御しています。
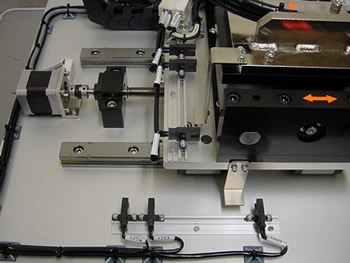
両端の2個は、直進運動の稼動範囲の限界を制御するためのリミットセンサで、中央のセンサはステッピングモータの回転開始の原点を定めるセンサです。この原点センサの位置(モータの回転角度位置)を0パルスとして位置決めしたい位置までの距離(回転角度)をパルス数でプログラミングします。
可動体の側壁にセンサドグと呼ばれる遮蔽板を取り付け、このセンサドグが光電センサの検出ビームを遮蔽することで可動体の位置が検出される仕組みです。
センサはセンサ用レール上で簡単に位置だしを行うことができます。