
- ① FA用ロボットの種類と用途
- ② 各駆動部の方式と構造
- ③ ハンド機能の一例
各駆動部の方式と構造
前項で紹介した産業用ロボットの駆動部や可動構造について、下記“ウェハ搬送用ロボット(水平多関節/スカラー型)”をリファレンスとして、その一例を紹介します。
下図は、半導体製造装置に搭載されるウェハ搬送用ロボットです。
例4) ダブルアームロボット(4軸仕様) ※4軸(R1, R2, Θ, Z)
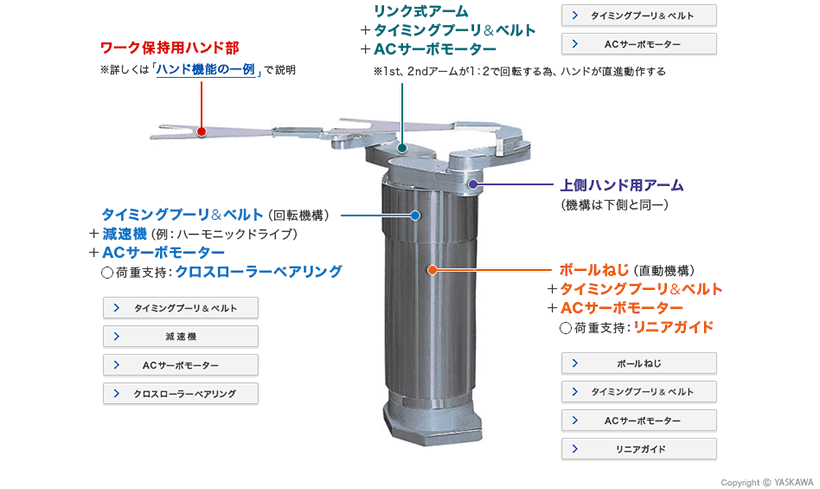
上図のように、ロボットでも各駆動部や荷重支持部の機構・構造は、基本的な駆動部品の組み合わせや直動部品を使った構成で成り立っています。
しかし、たとえメカ側が完成しても、それを動作させる制御次第でロボットの良し悪しが変わります。またメカ設計は、制御性を考慮しながら機構を決めて行かなければならず、互いに譲れない部分をどう対処するかという問題は、ロボット開発の難しい点の1つです。