
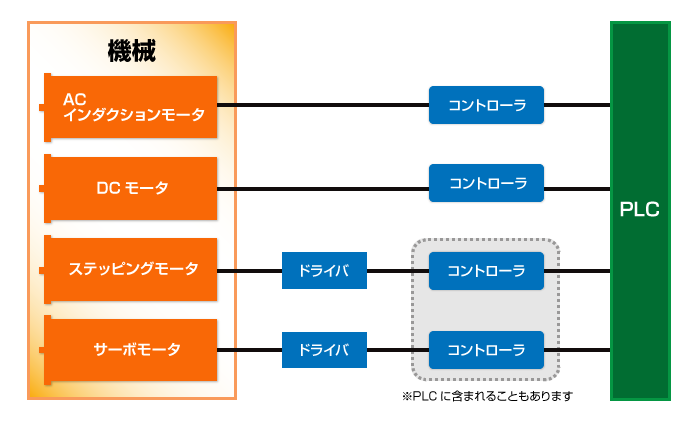
モータの制御システム例
モータの制御システムの例について、ご紹介します。
モータの種類により、構成が異なります。
ドライバの役割
1)
ステッピングモータドライバは、実際にモータを駆動する為の電源を供給しています。
又、単に電気を流すだけでなく、コトローラーからのパルス指令を受け、その速度(周波数)でモータに出しています。
これによりモータは、設定された速度で動くことができます。
これらは、一方的に指令を出していますので、オープンループと呼ばれます。
2)
サーボモータは、モータ側にエンコーダが搭載されており、位置と速度を検出しています。
ドライバはコントローラからのパルス指令を受け、その速度(周波数)でモータ側に電気を流す際
エンコーダからの位置検出を受け、実際との差分がない様、制御をしています。
これらは、常に実際との差分を補う働きをしていますので、クローズループと呼ばれます。