
- ① オープンループとクローズドループ
- ② フィードバック制御の構成
- ③ 装置のサイクルタイムに関して
フィードバック制御の構成
前項ではフィードバック制御の概要を説明しましたが、この項では、その実際の構成例を簡単に紹介します。
下図は、FAシステムの例を制御の視点から簡略的に図式化したものです。
例2) FAシステムの構成例
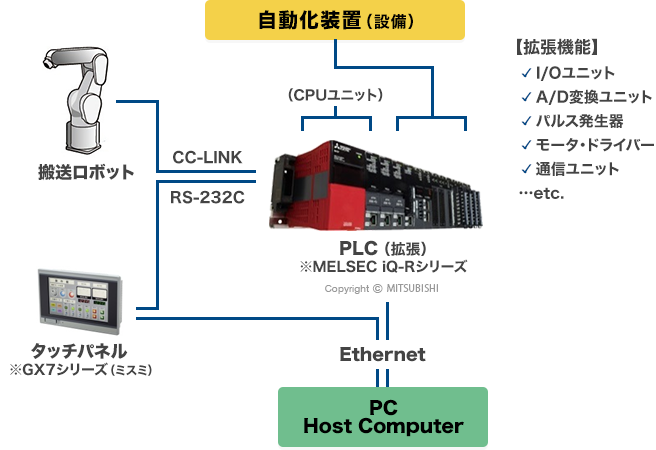
FAライン上の各装置ごと、あるいは幾つかのセクション毎にシステム化されており、各システム毎にタッチパネルを介して稼働状況をリアルタイムにモニタリングおよび、タッチパネル上からアナログ操作が可能となっています。(エラー停止時の原因読み取り、復旧動作、EMS: 非常停止、等)
さらに、上位ホストであるPCと各システムとをリンクすることで、(タッチパネルおよびPLCとLAN経由での高速通信)自動化ラインの遠隔操作・一元管理を可能とするように構築されます。
PLCの拡張ユニットには、色々なモジュールを搭載することができ、各種センサ信号を制御に取り込むためのAD(DA)変換やI/O入出力用モジュール、各種可動部のモーターを制御するためのドライバーやパルス生成用モジュール、既製ロボットを制御するコントローラや上位ホストPCとの通信用モジュールなど、さまざまな機能を追加して簡単に制御システムが構築できるようになっています。