
- ① 精密アクチュエータステージとは?
- ② 駆動方式と内部構成
- ③ 精密アクチュエータステージの用途例
② 駆動方式と内部構成
この項では、前項で紹介した精密アクチュエータステージの駆動部や可動構造について記載します。
また、ここでは、“XYステージ(2軸直交)”をリファレンスとして説明します。
まず、XYステージの例として、下図を参照願います。
(駿河精機製、自動直動ステージ ・・・ミスミ取り扱い製品)
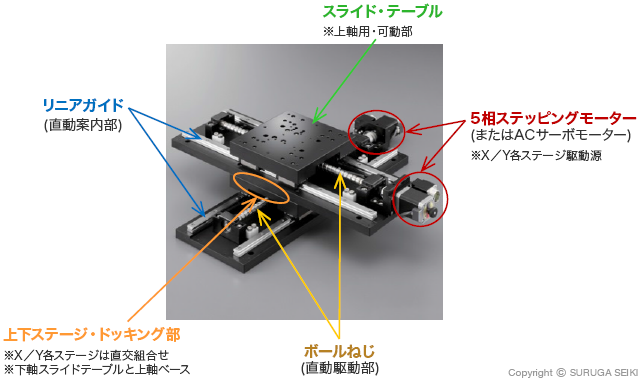
Fig.3) XYステージの概略構成
Fig.3)の図から解るように、基本的には1軸ステージ×2基を直交となるように組み上げたものに過ぎません。
(※1軸ステージ ⇒ 単軸アクチュエータ or ロボット ・・・と表現する場合もあります)
また、駆動方式に関しては、ステッピングモーター(サーボモーター)とボールねじがカップリングを介して直結されており、
ボールねじ・ナット部と固定されているテーブルが可動部位として直線動作する仕組みになっています。
この時、可動部位およびテーブル搭載物の荷重はリニアガイドによって支えられており、
ワーク含む可動部の動作時に発生するピッチ・ロール・ヨー方向の各モーメント荷重も同様にリニアガイドに支持されている為、
高い搬送精度の実現に寄与しています。
【補足】
上述のようなタイプ以外にも、駆動源としてリニアモーターを採用したものや、
直動機構としてベルト駆動を用いたもの等、多種多様なタイプが存在します。
駆動源に関して、ステッピングモーターあるいはサーボモーターに限定されていますが、
それについては後程、精密搬送制御の話の中で、別途補足したいと思います。