(!)Internet Explorer 11は、2022年6月15日マイクロソフトのサポート終了にともない、当サイトでは推奨環境の対象外とさせていただきます。
カテゴリ・メーカーから探す
メカニカル部品系
筐体・調整締結・素材
- フレーム・サポート部品・支柱
- キャスタ・アジャスタ・扉部品・外装部品
-
ねじ・ボルト・ナット・ワッシャ・カラー
ねじ・ボルト・ナット・ワッシャ・カラー
-
六角穴付きボルト
-
脱落防止ねじ
-
貫通穴付ボルト
-
六角ボルト
-
小ねじ
-
止めねじ
-
蝶ボルト・つまみねじ・化粧ビス
-
ストリッパ・リーマ・ショルダーボルト
-
でんでんボルト
-
アイボルト・アイナット
-
樹脂ねじ・セラミックねじ
-
全ねじ・スタッドボルト
-
いたずら防止ねじ
-
配管Uボルト
-
ユニファイねじ・インチねじ・ウィットねじ
-
マイクロねじ・微細ねじ
-
タッピングねじ・タップタイト・ハイテクねじ
-
ドリルねじ
-
座金組込みねじ
-
四角ボルト・丸ボルト
-
ねじ用アクセサリー・カバーキャップ
-
座金(ねじ用ワッシャ)
-
ナット
-
アンカーボルト
-
リベット・鋲
-
インサート
-
建材用スクリュー
-
ねじ用工具類
-
ワッシャ・カラー
-
シム
-
スナップピン・割りピン
-
マシンキー
-
止め輪・リング
-
スクリュープラグ
-
アジャスタ
-
ノックピン・段付ピン・スプリングピン
-
-
ばね・アブソーバ・調整締結・ピン・小物部品
-
素材(金属・樹脂・ゴム・スポンジ・ガラス)
素材(金属・樹脂・ゴム・スポンジ・ガラス)
-
対策・メンテナンス関連
































































空圧・油圧・配管・温調部品
































回転伝達・コンベヤ・モータ・ロボット



























直動・センサ・位置決め・ステージ




























特注部品・図面加工部品
電気系











































金型系




















消耗品・補修用品・備品系
切削加工用品
-
切削工具
切削工具
-
エンドミル
-
フライスチップ・ホルダー
-
ヘッド交換式工具
-
自由指定直刃エンドミル
-
専用カッター
-
旋削チップ
-
旋削ホルダ
-
完成バイト・ロウ付けバイト
-
ローレット
-
ドリル
-
ドリル関連部品・用品
-
タップ
-
タップ関連部品・用品
-
ダイス
-
ダイス関連部品・用品
-
ねじ山修正・除去工具
-
タップ・ダイスセット
-
ねじ切りカッター
-
リーマ
-
面取りカッター
-
面取りカッター関連部品・用品
-
切削工具関連備品
-
ホールソー・コアドリル・クリンキーカッター
-
ホールソー・コアドリル・クリンキーカッター関連部品
-
磁気ボール盤カッター
-
ボーリングシステム
-
ツーリングホルダ・ツーリングチャック
-
アングルヘッド
-
コレット
-
スリーブ・ソケット(ツーリング)
-
アーバ
-
ツーリング関連部品・用品
-
加工物基準位置測定器
-
芯出しバー
-
刃先位置測定器
-
ツールプリセッター
-
テストバー
-
プリセッター・芯出し・位置測定工具関連部品・用品
-
クーラントライナー・クーラントシステム
-
エアージェット・エアークーラー
-
クーラント関連部品・用品
-
円テーブル・ロータリーテーブル
-
- 工作機工具・治具











































生産加工用品
-
測定工具・計測機器
測定工具・計測機器
-
ノギス
-
pH計・導電率計
-
ノギス関連アクセサリ
-
マイクロメーター
-
検知管
-
ダイヤルゲージ
-
ダイヤルゲージ関連部品・用品
-
ピンゲージ
-
ピンゲージ関連部品・用品
-
ハイトゲージ
-
流量計
-
ハイトゲージ関連部品・用品
-
リングゲージ
-
デプスゲージ
-
シックネスゲージ・すきまゲージ
-
内径測定器
-
ゲージ
-
スコヤ
-
定規
-
コンベックス
-
巻尺
-
はかり
-
角度計
-
光学機器
-
水平器
-
レーザー測定器
-
マグネット関連
-
定盤
-
数取器・カウンタ
-
ガス測定器・検知器
-
ケガキ用品
-
ストップウォッチ・タイマー
-
テンションゲージ
-
環境測定器
-
温度計・湿度計
-
圧力計
-
顕微鏡
-
天秤・天秤関連品
-
分銅
-
硬度計
-
振動計・回転計
-
水質・水分測定器
-
粘度計
-
膜厚計・探知器
-
偏心測定器
-
表面粗さ測定器
-
音検出器
-
測定データ機器
-
アースメータ(接地抵抗計)
-
テスタ・マルチメータ
-
オシロスコープ
-
クランプメータ
-
検相器・検電器・導通チェッカ
-
絶縁抵抗計
-
ネットワークテスタ・ケーブルテスタ・光ファイバ計測器
-
安全試験器
-
回路素子測定器
-
信号源・ファンクションジェネレータ
-
電源装置
-
高周波測定器(RF測定器)
-
計測機器関連品
-
電圧計・電流計
-
電力計
-
その他電気計測器
-
- 放電加工用品
- 研削研磨・切断用品
-
手作業工具
手作業工具
-
スパナ・めがねレンチ・ラチェットレンチ
-
六角棒レンチ
-
モンキーレンチ
-
トルクスレンチ
-
ソケットレンチ
-
トルクレンチ
-
トルクレンチ関連部品・用品
-
トルク測定器
-
ドライバー
-
ドライバー関連部品・用品
-
トルクドライバー
-
トルクドライバー関連部品・用品
-
プライヤー
-
プライヤー関連部品
-
ニッパー
-
ニッパー関連部品
-
ペンチ
-
ペンチ関連部品
-
ハンマー
-
工具セット・ツールセット
-
工具セット・ツールセット関連部品・用品
-
カッターナイフ
-
タガネ
-
ドライバービット
-
ドライバービット関連用品
-
プーラ
-
刻印・ポンチ
-
車輌整備用工具
-
水道・空調配管用工具
-
切断用工具
-
絶縁工具
-
板金用工具
-
防爆工具
-
かしめ工具
-
電設工具
-
バール・テコ
-
ソケットビット
-
ソケットアダプター
-
ピンセット
-
-
電動工具・空圧工具
- 小型加工機・卓上加工機
- 溶接用品
- はんだ・静電気対策用品

























































































































































































MRO・工場用副資材


































































メーカーから探す
特集から探す
- MISUMI トップ
- > inCAD Library
- > No.000129 制限されたスペースでのワーク搬送
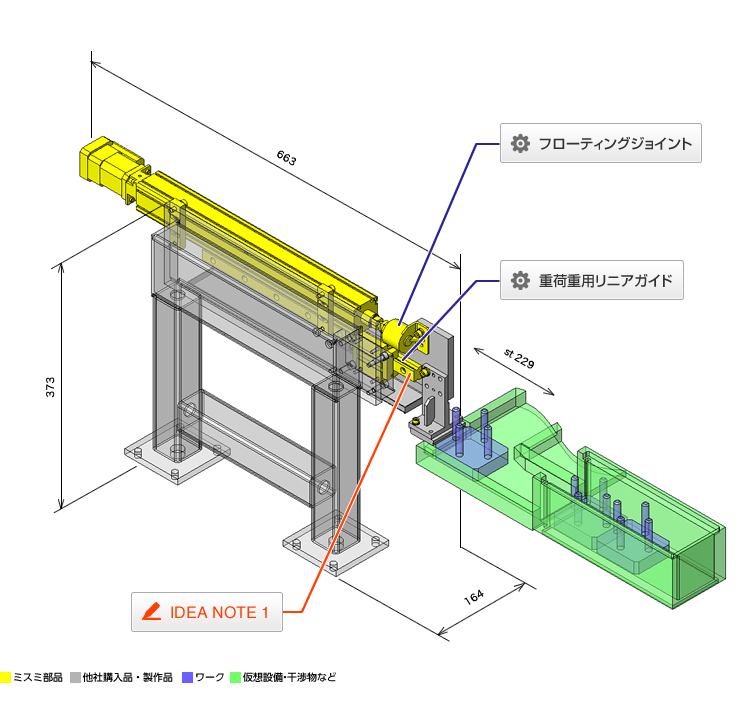
No.000129 制限されたスペースでのワーク搬送
リニアガイドのレール側を可動させることで押出し機構をコンパクト化


重荷重用リニアガイド

| 商品名 | 重荷重用リニアガイド 樹脂リテーナ付/互換軽予圧 |
|---|---|
| 型番 | SXWZ28-400 |
| 特徴 | 樹脂リテーナはボール同士の相互接触がないため高速運転時の低騒音化が可能です |
選定根拠
ブロック固定、レール稼動使用のためレール強度を重視
選定可能サイズ
■重荷重用リニアガイド樹脂リテーナ付/互換軽予圧
| タイプ | ブロック数 | 材質 | 硬度 |
|---|---|---|---|
| 標準ブロック | 1・2 | 炭素鋼 | 58HRC〜 |
| ワイドブロックキリ穴 | |||
| ワイドブロックタップ穴 |
■サイズ展開と各部寸法
| ブロック タイプ | 全高 | レール長さ(指定1mm単位) | ブロック寸法 | レール幅 | |||
|---|---|---|---|---|---|---|---|
| 1ブロック | 2ブロック | 幅 | 長さ | ||||
| 1ブロック | 2ブロック | ||||||
| 標準 ブロック | 24 | 100〜1480 | 160~1480 | 34 | 56.8 | 56.8×2個 | 15 |
| 28 | 160〜1960 | 220〜1960 | 42 | 65.2 | 65.2×2個 | 20 | |
| 33 | 160〜1960 | 220〜1960 | 48 | 81.6 | 81.6×2個 | 23 | |
| 42 | 200〜1960 | 280〜1960 | 60 | 96.4 | 96.4×2個 | 28 | |
| ワイド ブロック | 24 | 100〜1480 | 160〜1480 | 52 | 56.8 | 56.8×2個 | 15 |
| 28 | 160〜1960 | 220〜1960 | 59 | 65.2 | 65.2×2個 | 20 | |
| 33 | 160〜1960 | 220〜1960 | 73 | 81.6 | 81.6×2個 | 23 | |
| 42 | 200〜1960 | 280〜1960 | 90 | 96.4 | 96.4×2個 | 28 | |
選定順序
■リニアガイドの選定手順
- 使用条件を決定
- (移動体質量、送り速度、運転パターン、寿命時間)
↓
- リニアガイドの仕様を仮選定
- (使用条件に応じて、ブロックタイプ、 全高、レール長さを仮選定します。)
↓
- 基本的な安全性の確認
-
- ●許容荷重
- ●寿命
- ●予圧荷重
精度情報
■予圧と精度基準(重荷重用リニアガイド樹脂リテーナ付/互換軽予圧)

(μm)
| ラジアルすきま | -4~0(H24・28) |
|---|---|
| -5~0(H33・42) | |
| Hの寸法許容差 | ±20 |
| Hのペア相互差 | 15 |
| W2の寸法許容差 | ±30 |
| W2のペア相互差 | 25 |
(μm)
| レール長さ(mm) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| -80 | 81-125 | 126-200 | 201-250 | 251-315 | 316-400 | 401-500 | 501-630 | 631-800 | 801-1000 | 1001-1250 | 1251-1600 | 1601-2000 | |
| 走り平行度 | 6 | 6.5 | 7 | 8 | 9 | 11 | 12 | 14 | 16 | 18 | 20 | 23 | 26 |
速度・荷重(負荷情報)
■リニアガイドの定格荷重(重荷重用リニアガイド樹脂リテーナ付/互換軽予圧)
| 全高 | 基本定格荷重 | 静的許容モーメント | |||
|---|---|---|---|---|---|
| C(動)kN | C0(静)kN | MA N・m | MB N・m | Mc N・m | |
| 24 | 7.9 | 15.6 | 74 | 62 | 78 |
| 28 | 11.1 | 21.8 | 124 | 104 | 149 |
| 33 | 17.9 | 33.5 | 242 | 203 | 266 |
| 42 | 27.3 | 50.5 | 415 | 305 | 480 |

技術計算
■リニアガイドの寿命計算
- ●寿命
- リニアガイドが荷重を受けて直線往復運動をする場合には、たえず繰返し応力が転動体(鋼球)や転送面(レール)に作用しますので、材料の疲れによるフレーキングと呼ばれる、うろこ状の損傷が現れます。この最初のフレーキングが発生するまでの総走行距離を、リニアガイドの寿命といいます。
- ●定格寿命
- 定格寿命とは、一群の同じリニアガイドを、同じ条件で個々に走行させたとき、そのうちの90%がフレーキングを起こすことなく到達できる総走行距離をいいます。定格寿命は基本動定格荷重とリニアガイドに加わる荷重から次のように求めることができます。
-

- 実際にリニアガイドを使用する場合には、まず荷重計算を行わなければなりません。直線往復運動における荷重は、運動中の振動や衝撃、更にはリニアガイドに対する分布状況も十分に考慮する必要があり計算で求めることは容易ではありません。また使用温度なども、寿命に大きく影響を与えます。これらの条件を加味すると前記の計算式は次のようになります。
-

- L : 定格寿命(km)
- fH : 硬度係数(図-1参照)
- fT : 温度係数(図-2参照)
- fC : 接触係数(表-1参照)
- fW : 荷重係数(表-2参照)
- C : 基本動定格荷重(N)
- P : 作用荷重(N)
- ●硬度係数(fH)
-

リニアガイドの使用に際しては、ボールが接触する軸についても十分な硬度が必要です。適切な硬度が得られない場合は、許容荷重が減少することになり、結果として寿命が短くなります。
定格寿命を硬度係数で補正してください。
- ●温度係数(fT)
-

リニアガイドの温度が100℃を超えると、リニアガイド及び軸の硬度が下がり、常温で使用する場合より許容荷重が減少し、寿命も短くなります。定格寿命を温度係数で補正してください。
*リニアガイドは、各商品ページの耐熱温度の範囲内でご使用ください。
- ●接触係数(fC)
-
表-1. 接触係数
1本の軸に組付けられるベアリング数接触係数fc
1 1.00 2 0.81 3 0.72 4 0.66 5 0.61 実際のリニアガイドの使用に当っては、一本の軸に対し2ヶ以上のリニアガイドを使用する場合が一般的です。この場合、それぞれのリニアガイドにかかる荷重は加工精度によって変化し、等分布荷重にはなりません。その結果、一軸当りのリニアガイド数によってそのリニアガイド1ヶあたりの許容荷重が変化します。定格寿命を表-1の接触係数で補正してください。
- ●荷重係数(fW)
-
表-2. 荷重係数
使 用 条 件 fw 外部からの衝撃振動もなく
速度も遅い場合 15m/min以下1.0-1.5 特に著しい衝撃振動もなく
速度も中速の場合 60m/min以下1.5-20 外部から衝撃振動があり
速度は高速の場合 60m/minを超えるもの2.0-3.5 リニアガイドに作用する荷重を計算する場合、物体の重量のほかに運動速度に原因する慣性力、あるいはモーメント荷重、さらには各々の時間的変化なども正確に求めることが必要です。しかし、往復運動においては常に起動、停止の繰返しが伴う以外にも、振動・衝撃の要素が考えられ、正確な計算は困難です。したがって、表-2の荷重係数を用い、寿命計算を簡素化します。
- ●作用荷重Pの算出方法
- ブロック単体にモーメント荷重が掛かる場合は次の計算式によってモーメント荷重を作用荷重に換算してください。
-

- P:作用荷重(N)
- F:下向荷重(N)
- Co:静定格荷重(N)
- MA:静的許容モーメントーピッチング方向(N.m)
- MC:静的許容モーメントーローリング方向(N.m)
- Lp:ピッチング方向の荷重点距離(m)
- Lr:ローリング方向の荷重点距離(m)

フロ-テイングジョイント

| 商品名 | フロ-テイングジョイント ブラケット取付タイプ |
|---|---|
| 型番 | FLCL10-1.25 |
| 特徴 | 縦方向に取り付け可能なフローティングジョイントです |
選定根拠
稼動部取付方法を考慮し、ブラケット取付タイプを選択
選定可能サイズ
■フローティングジョイント一体型ブラケット取付タイプ
| 部品名 | 材質 | 表面処理 | |
|---|---|---|---|
| 本体 | 鋼球保持板 | ニトリルゴム | - |
| ロッド先端ソケット | SS400 | 三価クロメート | |
| キャップ | SUJ2 | ||
| 鋼球押さえ | |||
| ボールホルダ | |||
| ケース | FC200相当 | ||
| ねじ部 | SS400 | ||
| 取り付け部 | (M8〜M12) | SPCC | |
| (M14〜M26) | FC200 | エナメル塗装 (青色) | |
■サイズ展開と各部寸法
| ねじ径-ピッチ | 全長 | 本体外径 | 全幅 | 芯 高さ | 許容 偏芯量 |
|---|---|---|---|---|---|
| M8−1.0 | 49.5 | φ30 | 31 | 16 | 0.5 |
| M10−1.25 | 61.5 | φ36 | 43 | 19 | 0.75 |
| M12−1.5 | |||||
| M14−1.5 | 110 | φ51 | 51 | 26 | 1 |
| M16−1.5 | |||||
| M18−1.5 | 120 | ||||
| M22−1.5 | 145 | φ62 | 62 | 32 | 1.5 |
| M26−1.5 | 173 | φ69 | 69 | 37 |

-
 CADデータ・簡易図面データ利用規定
CADデータ・簡易図面データ利用規定- 本規定は、株式会社ミスミ(以下「当社」といいます)が運営するWebサイト「MISUMIサイト」(以下「当サイト」といいます)に掲載されているCADデータ・簡易図面データをダウンロードする場合のご利用条件を定めたものです。お客さまは当サイトに掲載されているCADデータ・簡易図面データをダウンロードする場合、本規定に同意したものとみなされます。
- 1. データの利用目的
-
株式会社ミスミは、当サイトに掲載する各種データを、お客さまが以下の目的に利用するため(以下「利用目的」といいます)に提供しています。
(1) CADデータ(3D CADデータおよび2D CADデータをいいます): CADを用いたレイアウト設計において、当社または当社取り扱いメーカーの商品(以下「商品」といいます)の干渉・形状等を簡便に確認するため
(2) 簡易図面データ(PDF):商品の仕様を簡便に確認するため - 2. データの特性
- CADデータおよび簡易図面データ(以下総称して「データ」といいます)のうち、公差・表面の粗さ・面取り等については、実際の商品の形状と異なる場合があります。
また、データの容量を軽くし、安定したデータの提供を維持するため、一部の商品につきましては油溝形状やねじ、ばね形状等を省略したデータとなっている場合がございます。あらかじめご了承のうえご利用ください。 - 3. 免責事項
- 当社は、データの作成にあたり十分な注意をしておりますが、上述のデータの特性等により、データの正確性、完全性、安全性、およびお客さまにおける有用性等をいかなる保証をするものではありません。また、当社は予告・通知なしにデータを変更、追加または削除することがあります。当社は、理由の如何に関わらず、データの利用、変更および削除により生じるいかなる損害に対しても責任を負うものではありません。
当社は、当社サイトにおいて複数の部品を組み合わせた設計事例のデータをお客さまに提供する場合があります。その場合の品質・正確性・機能・安全性・信頼性等については一切保証いたしませんので予めご了承ください。
当社はお客さまに対し、ダウンロードいただいたデータの利用の停止及び破棄を依頼することができるものとし、そのような依頼があった場合、お客さまは当社の依頼に基づき、速やかにデータの利用の停止または破棄するものとします。 - 4. 禁止事項
-
お客さまは、データの全部または一部について、次の各号に掲げる行為をすることはできません。
(1) 当社グループおよび当社が認める者以外の第三者に対し、商品の見積依頼または注文を行うこと
(2) 第三者に利用させ、または自らの営業活動に利用して、第三者から商品の見積依頼もしくは注文を受けること
(3) 当社の承諾なく、データに関連する当サイトへのリンクを、自らのWebサイト等に表示すること
(4) 利用目的の範囲を超えて利用すること
(5) 利用目的のために必要な範囲を超えて複製すること
(6) 修正、改変、改ざん、翻訳または翻案すること
(7) 販売、譲渡、貸与、再利用許諾、または公衆送信その他の方法で、第三者に提供することおよび利用させること
(8) 内容を改変、リバースエンジニアリング、逆コンパイル、逆アッセンブル、その他解析すること
(9) 当社に無断で一般に公開または展示すること
(10) 当社と同一または類似する商品及びサービスを提供する目的で利用すること
(11) 大量にデータを取得する等により当サイトに負荷をかける行為を行うこと - 5. 著作権等
-
データに関する権利(特許権、著作権等の知的財産権を含みます。以下同様。)は、当社または当社にデータを提供した第三者(取り扱いメーカーを含みます)に帰属します。お客さまは、本規定に従うことを条件として、データに関して利用目的の範囲内での非独占的かつ無償の利用が許諾されます。データダウンロードにより、データに含まれる知的財産権がお客さまに移転するものではありません。当社の事前の許可を得ることなく、利用目的以外にデータを利用(複製、譲渡、貸与、翻案等を含む)することはできません。
利用目的、本規約および法令等に違反したデータの利用が認められた場合、当社は、利用者に対しデータおよび当サイトの利用を禁止するほか、法的措置を取る場合があります。 - 6. 第三者規定
- 第三者(取り扱いメーカーを含みます)が権利を有するデータやデータ作成・閲覧ソフトウェアを利用する場合は、別途、第三者が定める規定に同意しなければデータやソフトウェアが利用できない場合がございます。またこの場合、当社は当該第三者のデータ及びソフトウェアの瑕疵、権利侵害等については、一切の責任を負いません。
- 7. 輸出管理
- お客様がデータを直接、もしくは間接的に海外へ提供する場合、お客様ご自身の責任において「外国為替及び外国貿易法」ならびに適用される全ての法令・規則を遵守していただく必要があります。
- 8. 規定改定
-
当社は、当社の裁量により、本規定の改定、変更及び修正(以下「改定等」といいます)を行うことができるものとします。
当社は、本規定の改定等にあたり、改定等の効力発生日の前までに、改定等の内容および効力発生日その他必要な事項を当サイトの「重要なお知らせ」(URL:https://jp.misumi-ec.com/news/topics/important/)に掲示する方法その他相当な方法で周知します。
本規定の改定等は、周知の際に定める効力発生日から適用されるものとします。 - 9. 条項一部無効または合意対象除外時の取扱い
- 本規定のいずれかの条項が制定法、命令、規則等の適用法に基づいて無効または合意対象の除外になる場合には、当該条項は適用法の遵守に必要な範囲でのみ、修正または削除されたものとみなします。本規定のその他の条項は全面的に有効に存続するものとします。
- 10.その他
-
お客さまが本規定に違反した場合、当社はお客さまに対して当社の損害および費用(弁護士費用を含む)を請求できるものとします。
本規定は、日本法に従って解釈されるものとします。データの利用ならびに本規定に関する紛争が生じた場合、東京地方裁判所を第一審の専属的合意管轄裁判所とします。 - 改定日:2025年01月20日
CADデータダウンロード
CADデータダウンロード: ファイル形式
CADデータに関する留意事項
-
アセンブリデータは構想設計段階の組立図で、構造を説明するためのものです。従って、詳細な部品形状は、各種設計条件を加味して仕上げられたものではありません。
データの一部を流用される際は、ご設計中の条件に適合した仕様に編集してください。 -
ユニットのアセンブリCADデータは、いくつかのサブアセンブリで構成されています。
サブアセンブリ単位で流用、編集できるように構成することを意図しています。 - 製作部品は寸法や形状を編集しやすいスケッチ、ヒストリーを心がけて作成しています。
- ユニットに使用している他社購入品CADデータは、カタログを参照し、ミスミ監修にてオリジナルで作成しています。
※枠で囲われた部分がサブアセンブリ単位
-

- ※ユニットのアセンブリCADデータは、いくつかのサブアセンブリで構成されています。
サブアセンブリ単位で流用、編集できるように構成することを意図しています。
仕様
目的・動作
- リニアガイドのブロックを固定し、レールを可動させ
干渉を避けた上で、ワークを搬送BOX内へと押し込む構造
環境・操作性
- ワーク自動搬送機構
- 駆動源にエアが使えない環境で有効
対象ワーク
- 樹脂マガジン(樹脂パレット)
- 外形寸法:W67×D80×H70[mm]
- ワーク質量:170[g]×3ヶ=510[g]
特徴
動作仕様・寸法
- 外観寸法:W663×D164×H373[mm]
- 単軸ロボットストローク:300[mm] (動作可能ストローク:229[mm])
必要精度・荷重
- ワーク搬送繰り返し位置決め精度:±0.1[mm]
- ワーク搬送必要可搬質量:2.4[kg]
- ワーク搬送速度:350[mm/s]
主要部品の選定根拠
- 単軸ロボット
- 最大可搬質量が可動部品質量+ワーク重量以上を満足するものを選定
- 搬送速度の使用を満たし、安価なものを選定
- 搬送ストロークを満たすものを選定
- リニアガイド
- 許容モーメントを満たすものを選定
設計ポイント
主要部品の計算工程
- 負荷モーメントに耐え得るリニアガイドか、搬送仕様(可搬質量、速度、ストローク)に適したロボットか検証する
- リニアガイド許容モーメント
- リニアガイド許容モーメント:MB = 104[N・m] (ヨーイング)
- 単軸ロボット最大押付力:f=150[N]
回転中心から作用点間距離:l =0.136[m]
安全率:e=5倍
負荷モーメント:M=150[N]×0.136[m]=20.4[N・m]
必要許容モーメント:MB>M・e=20.4[N]×5[m] =102[N・m]
よって許容モーメント:104[N・m]のものを選定
- 搬送質量:2.25[kg]
- リニアガイドレール:0.92[kg]、スライドプレート:0.58[kg]、パン:0.32[kg]、
爪受け:0.37[kg]、爪:0.06[kg]
- リニアガイドレール:0.92[kg]、スライドプレート:0.58[kg]、パン:0.32[kg]、
- ワーク質量:0.17[kg]×3ヶ=0.51[kg]
- 摩擦係数:0.3(仮定値)
- 動作必要力=ワーク質量×摩擦係数=0.51[kg]×0.3=0.153[kg]
- 必要可搬質量
- 2.25[kg] + 0.153[kg] = 2.403[kg] < 25[kg] (単軸ロボット最大可搬質量)
- 必要速度
- 1サイクル: 3[s]
必要速度=(搬送距離×2)÷3=458[mm]÷3[s]=153[mm/s]
上記は、加速減速時間を考慮していない為
加速度:0.1G=980[mm/s²](仮定値)
設定速度:350[mm/s]<500[mm/s] (単軸ロボット最大速度)
加速時間=速度÷加速度=350[mm/s]÷980[mm/s²]=0.33[s]
加速減速時の移動距離=加速度×加速時間÷2= 980[mm/s²]×0.33[s]÷2= 53.4[mm]
設定速度での移動距離=1サイクル距離-1サイクル加速減速時の移動距離=229[mm]×2-53.4[mm]×4=244.4[mm]
設定速度での移動時間=設定速度での移動距離÷設定速度=244.4[mm]÷350[mm/s]=0.77[s] - 1サイクル=0.77[s]+0.33[s]×4=2.09[s]
- 余裕時間:3[s]-2.09[s]=0.91[s]
- 1サイクル: 3[s]
構造の作り込みと設計の勘所
- ワーク搬送用テーブルの真上をリニアガイドが通る為、グリス落下防止の用にパン(グリス受け)を設けている
- 検索コード:#UL129