メカニカル部品技術窓口
絞り込み条件
ストローク(mm)
~mm- 50
- 75
- 100
- 150
最大可搬質量(水平)(kg)
~mm- 1
- 2
- 2.5
- 4
- 5
- 6
- 8
- 12
最大可搬質量(垂直)(kg)
~mm- 0.25
- 0.5
- 1
- 1.5
- 2
- 2.5
- 4
駆動方式
- すべりねじ
- すべりねじ
- すべりねじ+ベルト
リード(mm)
~mm- 4
- 5
- 8
- 10
- 16
テーブル幅 W1(mm)
~mm- 32
- 45
- 61
ブレーキ
~mm- なし
- あり
最大推力(N)
~mm- 7.5
- 10
- 11
- 15
- 20
- 35
- 38
- 55
- 62
- 100
- 180
テーブル長 L1(mm)
~mm- 111
- 116.5
- 137
- 143
- 191.5
- 207
- 285
最高速度(mm/sec)
~mm- 150
- 200
- 400
サイズ
~mm- 8
- 16
- 25
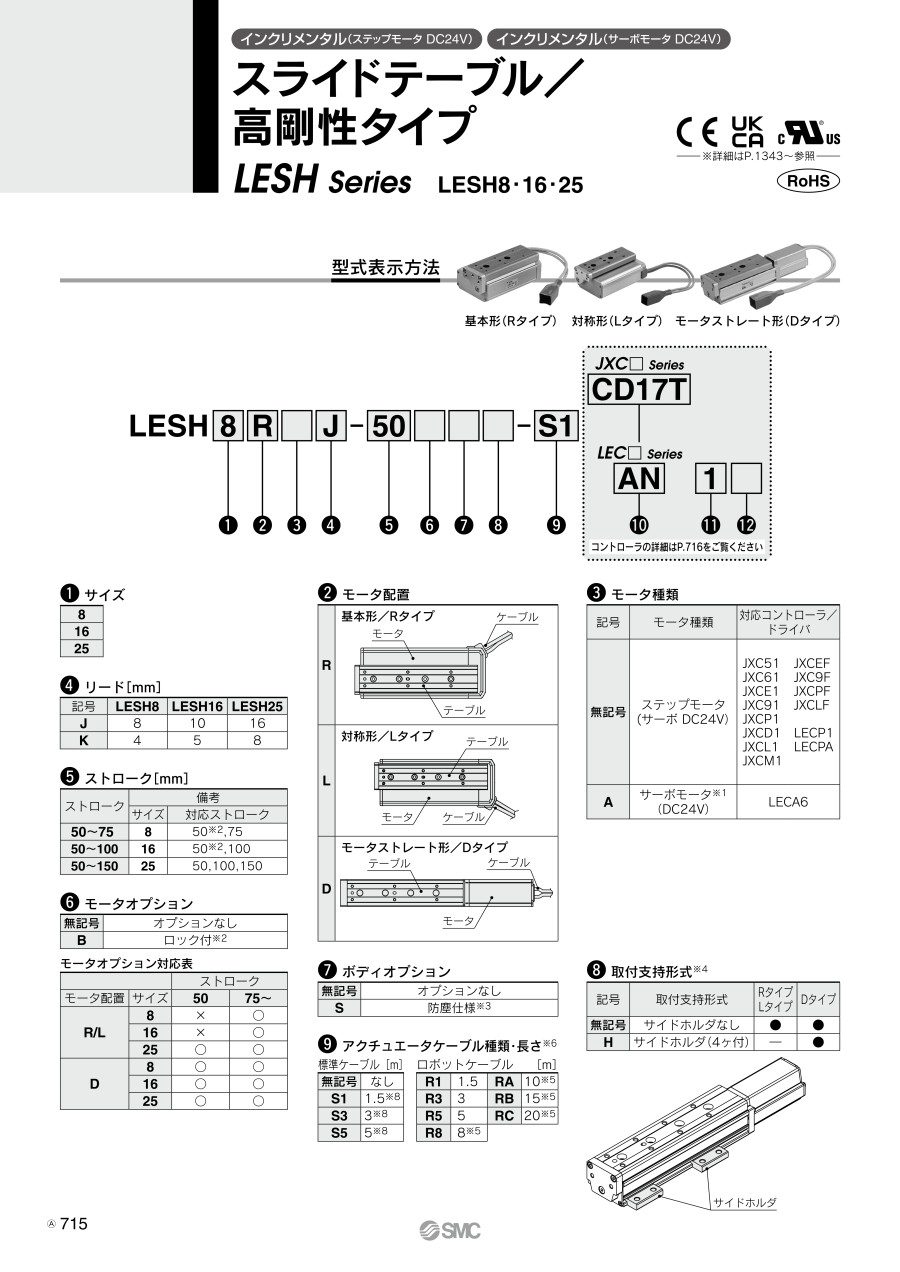
モータ配置
取付支持形式
ステップデータ(点)
~mm- 14
- 64
アクチュエータケーブル長さ(m)
~mm- 1.5
- 3
- 5
- 8
- 10
- 15
- 20
- ケーブルなし
I/Oケーブル長さ/通信プラグ(m)
タイプ
~mmCAD
- 2D
- 3D
出荷日
- すべて
- 6日以内
- 19日以内
電動スライドテーブル 高剛性タイプ LESHシリーズ



- 単価(税別)
- -円
- 合計(税別)
- -円(税込価格:-円)
- 出荷日
- -(参考出荷日:-円)
商品情報
外形図
LESH8R



注1)原点復帰動作等により、テーブルが可動する範囲です。
周辺にあるワーク・設備等と干渉しないようにご注意ください。
注2)原点復帰後の位置です。
注3)[]は原点復帰方向を変更した場合です。
注4)ワーク固定用ボルトが長すぎますとガイドブロックに当たり作動不良などの原因となります。
最大ねじ込深さと最小ねじ込深さの間になる長さのボルトをご使用ください。
注5)モータケーブルおよびロックケーブルを繰返し屈曲動作させないよう固定してご使用ください。
LESH16R



注1)原点復帰動作等により、テーブルが可動する範囲です。
周辺にあるワーク・設備等と干渉しないようにご注意ください。
注2)原点復帰後の位置です。
注3)[]は原点復帰方向を変更した場合です。
注4)ワーク固定用ボルトが長すぎますとガイドブロックに当たり作動不良などの原因となります。
最大ねじ込深さと最小ねじ込深さの間になる長さのボルトをご使用ください。
注5)モータケーブルおよびロックケーブルを繰返し屈曲動作させないよう固定してご使用ください。
LESH25R



注1)原点復帰動作等により、テーブルが可動する範囲です。
周辺にあるワーク・設備等と干渉しないようにご注意ください。
注2)原点復帰後の位置です。
注3)[]は原点復帰方向を変更した場合です。
注4)ワーク固定用ボルトが長すぎますとガイドブロックに当たり作動不良などの原因となります。
最大ねじ込深さと最小ねじ込深さの間になる長さのボルトをご使用ください。
注5)モータケーブルおよびロックケーブルを繰返し屈曲動作させないよう固定してご使用ください。
LESH8L



注1)原点復帰動作等により、テーブルが可動する範囲です。
周辺にあるワーク・設備等と干渉しないようにご注意ください。
注2)原点復帰後の位置です。
注3)[]は原点復帰方向を変更した場合です。
注4)ワーク固定用ボルトが長すぎますとガイドブロックに当たり作動不良などの原因となります。
最大ねじ込深さと最小ねじ込深さの間になる長さのボルトをご使用ください。
注5)モータケーブルおよびロックケーブルを繰返し屈曲動作させないよう固定してご使用ください。
LESH16L



注1)原点復帰動作等により、テーブルが可動する範囲です。
周辺にあるワーク・設備等と干渉しないようにご注意ください。
注2)原点復帰後の位置です。
注3)[]は原点復帰方向を変更した場合です。
注4)ワーク固定用ボルトが長すぎますとガイドブロックに当たり作動不良などの原因となります。
最大ねじ込深さと最小ねじ込深さの間になる長さのボルトをご使用ください。
注5)モータケーブルおよびロックケーブルを繰返し屈曲動作させないよう固定してご使用ください。
LESH25L



注1)原点復帰動作等により、テーブルが可動する範囲です。
周辺にあるワーク・設備等と干渉しないようにご注意ください。
注2)原点復帰後の位置です。
注3)[]は原点復帰方向を変更した場合です。
注4)ワーク固定用ボルトが長すぎますとガイドブロックに当たり作動不良などの原因となります。
最大ねじ込深さと最小ねじ込深さの間になる長さのボルトをご使用ください。
注5)モータケーブルおよびロックケーブルを繰返し屈曲動作させないよう固定してご使用ください。
LESH8D



注1)原点復帰動作等により、テーブルが可動する範囲です。
周辺にあるワーク・設備等と干渉しないようにご注意ください。
注2)原点復帰後の位置です。
注3)[]は原点復帰方向を変更した場合です。
注4)モータエンドカバーから手動操作ねじまでの距離は最大16mmです。
モータエンドカバーの穴径はφ5.5です。
注5)ワーク固定用ボルトが長すぎますとガイドブロックに当たり作動不良などの原因となります。
最大ねじ込深さと最小ねじ込深さの間になる長さのボルトをご使用ください。
注6)モータケーブルおよびロックケーブルを繰返し屈曲動作させないよう固定してご使用ください。
LESH16D



注1)原点復帰動作等により、テーブルが可動する範囲です。
周辺にあるワーク・設備等と干渉しないようにご注意ください。
注2)原点復帰後の位置です。
注3)[]は原点復帰方向を変更した場合です。
注4)モータエンドカバーから手動操作ねじまでの距離は最大17mmです。
モータエンドカバーの穴径はφ5.5です。
注5)ワーク固定用ボルトが長すぎますとガイドブロックに当たり作動不良などの原因となります。
最大ねじ込深さと最小ねじ込深さの間になる長さのボルトをご使用ください。
注6)モータケーブルおよびロックケーブルを繰返し屈曲動作させないよう固定してご使用ください。
LESH25D



製品仕様
ステップモータ(サーボ DC24V)
| 型番 | LESH8□ | LESH16□ | LESH25□ | |||||
|---|---|---|---|---|---|---|---|---|
| ア ク チ ュ エ ー タ 仕 様 | ストローク[mm] | 50,75 | 50,100 | 50,100,150 | ||||
| 可搬質量[kg]注1)注3) | 水平 | 2 | 1 | 8 | 5 | 12 | 8 | |
| 垂直 | 0.5 | 0.25 | 2 | 1 | 4 | 2 | ||
| 押当て推力30%~70%[N]注2)注3) | 6~15 | 4~10 | 23.5~55 | 15~35 | 77~180 | 43~100 | ||
| 速度[mm/s]注1)注3) | 10~200 | 20~400 | 10~200 | 20~400 | 10~150 | 20~400 | ||
| 押当て速度[mm/s] | 10~20 | 20 | 10~20 | 20 | 10~20 | 20 | ||
| 最大加減速度[mm/s2] | 5,000 | |||||||
| 繰返し位置決め精度[mm] | ±0.05 | |||||||
| ロストモーション[mm]注4) | 0.15以下 | |||||||
| ねじリード[mm] | 4 | 8 | 5 | 10 | 8 | 16 | ||
| 耐衝撃/耐振動[m/s2]注5) | 50/20 | |||||||
| 駆動方式 | すべりねじ+ベルト(R/Lタイプ)、すべりねじ(Dタイプ) | |||||||
| ガイド方式 | リニアガイド(循環) | |||||||
| 使用温度範囲[℃] | 5~40 | |||||||
| 使用湿度範囲[%RH] | 90以下(結露なきこと) | |||||||
| 電 気 仕 様 | モータサイズ | □20 | □28 | □42 | ||||
| モータ種類 | ステップモータ(サーボ DC24V) | |||||||
| エンコーダ | インクリメンタル A/B相(800パルス/回転) | |||||||
| 定格電圧[V] | DC24±10% | |||||||
| 消費電力[W]注6) | 20 | 43 | 67 | |||||
| 運転待機電力[W]注7) | 7 | 15 | 13 | |||||
| 瞬時最大電力[W]注8) | 35 | 60 | 74 | |||||
| ロ ッ ク 仕 様 | 形式 | 注9) | 無励磁作動型 | |||||
| 保持力[N] | 24 | 2.5 | 300 | 48 | 500 | 77 | ||
| 消費電力[W]注10) | 3.5 | 2.9 | 5 | |||||
| 定格電圧[V] | DC24±10% | |||||||
注1)搬送質量により速度が変動します。
注2)押当て推力の精度は±20%(F.S.)です。
注3)ケーブルの長さ・負荷・取付条件等により、速度・推力は変化する場合があります。
ケーブル長さ5mを超える場合は、速度・推力は5m毎に最大10%低下します。(15mの場合:最大20%減)
注4)往復動作の誤差を補正する場合の目安値になります。
注5)耐振動:45~2,000Hz1掃引、送りねじ軸方向および直角方向にて誤動作なし。(初期値における)
耐衝撃:落下式衝撃試験で、送りねじの軸方向および直角方向にて誤動作なし。(初期値における)
注6)消費電力とは、コントローラを含む運転時の消費電力を示します。
注7)運転待機電力とは、コントローラを含む運転中に待機している時の消費電力を示します。押当て運転時を除く。
注8)瞬時最大電力とは、コントローラを含む運転時の瞬時最大電力を示します。電源容量の選定時に使用してください。
注9)ロック付のみ。
注10)ロック付を選択の場合は、消費電力を加算してください。
サーボモータ(DC24V)
| 型番 | LESH8□A | LESH16□A | LESH25R・L A注1) | |||||
|---|---|---|---|---|---|---|---|---|
| ア ク チ ュ エ ー タ 仕 様 | ストローク[mm] | 50,75 | 50,100 | 50,100,150 | ||||
| 可搬質量[kg] | 水平 | 2 | 1 | 5 | 2.5 | 6 | 4 | |
| 垂直 | 0.5 | 0.25 | 2 | 1 | 2.5 | 1.5 | ||
| 押当て推力50%~100%[N]注2) | 7.5~11 | 5~7.5 | 17.5~35 | 10~20 | 31~62 | 19~38 | ||
| 速度[mm/s] | 1~200 | 1~400 | 1~200 | 1~400 | 1~150 | 1~400 | ||
| 押当て速度[mm/s]注2) | 1~20 | |||||||
| 最大加減速度[mm/s2] | 5,000 | |||||||
| 繰返し位置決め精度[mm] | ±0.05 | |||||||
| ロストモーション[mm]注3) | 0.15以下 | |||||||
| ねじリード[mm] | 4 | 8 | 5 | 10 | 8 | 16 | ||
| 耐衝撃/耐振動[m/s2]注4) | 50/20 | |||||||
| 駆動方式 | すべりねじ+ベルト(R/Lタイプ)、すべりねじ(Dタイプ) | |||||||
| ガイド方式 | リニアガイド(循環) | |||||||
| 使用温度範囲[℃] | 5~40 | |||||||
| 使用湿度範囲[%RH] | 90以下(結露なきこと) | |||||||
| 電 気 仕 様 | モータサイズ | □20 | □28 | □42 | ||||
| モータ出力[W] | 10 | 30 | 36 | |||||
| モータ種類 | サーボモータ(DC24V) | |||||||
| エンコーダ | インクリメンタル A/B(800パルス/回転)/Z相 | |||||||
| 定格電圧[V] | DC24±10% | |||||||
| 消費電力[W]注5) | 58 | 84 | 144 | |||||
| 運転待機電力[W]注6) | 4(水平)/7(垂直) | 2(水平)/15(垂直) | 4(水平)/43(垂直) | |||||
| 瞬時最大電力[W]注7) | 84 | 124 | 158 | |||||
| ロ ッ ク 仕 様 | 形式 | 注8) | 無励磁作動型 | |||||
| 保持力[N] | 24 | 2.5 | 300 | 48 | 500 | 77 | ||
| 消費電力[W]注9) | 3.5 | 2.9 | 5 | |||||
| 定格電圧[V] | DC24±10% | |||||||
注1)LESH25DAは対応できません。
注2)LESH8□Aの押当て推力範囲は50~75%です。押当て推力の精度は±20%(F.S.)です。
注3)往復動作の誤差を補正する場合の目安値になります。
注4)耐振動:45~2,000Hz1掃引、送りねじ軸方向および直角方向にて誤動作なし。(初期値における)
耐衝撃:落下式衝撃試験で、送りねじの軸方向および直角方向にて誤動作なし。(初期値における)
注5)消費電力とは、コントローラを含む運転時の消費電力を示します。
注6)運転待機電力とは、コントローラを含む最大負荷搭載での運転中に待機している時の消費電力を示します。押当て運転時を除く。
注7)瞬時最大電力とは、コントローラを含む運転時の瞬時最大電力を示します。電源容量の選定時に使用してください。
注8)ロック付のみ。
注9)ロック付を選択の場合は、消費電力を加算してください。
規格表
LESH8R

LESH16R

LESH25R

LESH8L

LESH16L

LESH25L

LESH8D

LESH16D

LESH25D

型番リスト
| 型番 |
|---|
通常単価(税別)
(税込単価) | 通常出荷日 |
|---|
49,444円 ( 54,388円 ) | 19日目 |
78,944円 ( 86,838円 ) | 19日目 |
85,147円 ( 93,662円 ) | 19日目 |
88,271円 ( 97,098円 ) | 19日目 |
112,812円 ( 124,093円 ) | 19日目 |
61,002円 ( 67,102円 ) | 19日目 |
94,165円 ( 103,582円 ) | 19日目 |
110,601円 ( 121,661円 ) | 19日目 |
49,890円 ( 54,879円 ) | 19日目 |
74,925円 ( 82,418円 ) | 19日目 |
59,217円 ( 65,139円 ) | 19日目 |
81,842円 ( 90,026円 ) | 19日目 |
50,828円 ( 55,911円 ) | 19日目 |
83,805円 ( 92,186円 ) | 19日目 |
90,990円 ( 100,089円 ) | 19日目 |
65,695円 ( 72,265円 ) | 19日目 |
51,273円 ( 56,400円 ) | 19日目 |
91,435円 ( 100,579円 ) | 19日目 |
49,444円 ( 54,388円 ) | 19日目 |
78,944円 ( 86,838円 ) | 19日目 |
80,280円 ( 88,308円 ) | 19日目 |
81,663円 ( 89,829円 ) | 19日目 |
77,111円 ( 84,822円 ) | 19日目 |
80,280円 ( 88,308円 ) | 19日目 |
83,764円 ( 92,140円 ) | 19日目 |
83,805円 ( 92,186円 ) | 19日目 |
85,147円 ( 93,662円 ) | 19日目 |
90,990円 ( 100,089円 ) | 19日目 |
96,591円 ( 106,250円 ) | 19日目 |
61,002円 ( 67,102円 ) | 19日目 |
105,765円 ( 116,342円 ) | 19日目 |
79,666円 ( 87,633円 ) | 19日目 |
103,172円 ( 113,489円 ) | 19日目 |
50,828円 ( 55,911円 ) | 19日目 |
80,328円 ( 88,361円 ) | 19日目 |
81,663円 ( 89,829円 ) | 19日目 |
85,188円 ( 93,707円 ) | 19日目 |
98,038円 ( 107,842円 ) | 19日目 |
90,990円 ( 100,089円 ) | 19日目 |
103,846円 ( 114,231円 ) | 19日目 |
102,502円 ( 112,752円 ) | 19日目 |
62,385円 ( 68,624円 ) | 19日目 |
93,536円 ( 102,890円 ) | 19日目 |
62,831円 ( 69,114円 ) | 19日目 |
110,548円 ( 121,603円 ) | 19日目 |
101,075円 ( 111,183円 ) | 19日目 |
45,295円 ( 49,825円 ) | 6日目 |
92,449円 ( 101,694円 ) | 19日目 |
81,366円 ( 89,503円 ) | 19日目 |
73,232円 ( 80,555円 ) | 19日目 |
74,569円 ( 82,026円 ) | 19日目 |
92,554円 ( 101,809円 ) | 19日目 |
86,394円 ( 95,033円 ) | 19日目 |
80,725円 ( 88,798円 ) | 19日目 |
126,179円 ( 138,797円 ) | 19日目 |
49,578円 ( 54,536円 ) | 19日目 |
66,984円 ( 73,682円 ) | 19日目 |
56,852円 ( 62,537円 ) | 19日目 |
92,105円 ( 101,316円 ) | 19日目 |
125,783円 ( 138,361円 ) | 19日目 |
詳細情報
基本情報
ガイドレールとテーブルを一体化循環式リニアガイド採用。
【特長】
・コンパクト・省スペース
・体積比61%減
・モータをボディに内蔵
・対称形Lタイプ:テーブルおよびケーブルの位置がRタイプと反対になり設計の幅が広がります
・モータストレート形Dタイプ:幅寸法を短縮、MAX.45%減
この商品を見た人は、こんな商品も見ています






最近見た商品
通常価格、通常出荷日が表示と異なる場合がございます

単軸ロボットカテゴリの売れ筋ランキング
通常価格、通常出荷日が表示と異なる場合がございます

ミスミ
リニアモータアクチュエータ 10シリーズ 標準タイプ インクリメンタル・アブソリュート仕様
0通常価格(税別):97,200円~
通常出荷日:7日目~

SMC
e-Actuator かんたん制御 コントローラ一体型/スライダタイプ EQFS□Hシリーズ
0通常価格(税別):112,455円~
通常出荷日:16日目
オリエンタルモーター
電動スライダ EZSシリーズ
0通常価格(税別):50,325円~
通常出荷日:14日目~
ミスミ
単軸ロボットRS2 -モータ折返しタイプ-
4.5通常出荷日:在庫品1日目
ミスミ
単軸ロボットRSD3
4通常出荷日:在庫品1日目
SMC
コントローラ(ステップデータ入力タイプ) サーボモータ(DC24V) LECA6シリーズ
4通常価格(税別):505円~
通常出荷日:当日出荷可能在庫品1日目~
SMC
電動アクチュエータ スライダタイプ ボールねじ駆動 LEFSシリーズ ステップモータ・サーボモータ
4通常価格(税別):47,391円~
通常出荷日:6日目~
ミスミ
単軸ロボット専用ポジショナ・コントローラ -ステッピングモータ用-
1通常価格(税別):16,000円~
通常出荷日:4日目
ミスミ
単軸ロボットRS/RSH/RSF/RSBシリーズ用I/Oケーブル
0通常価格(税別):4,000円~
通常出荷日:4日目