メカニカル部品技術窓口
絞り込み条件
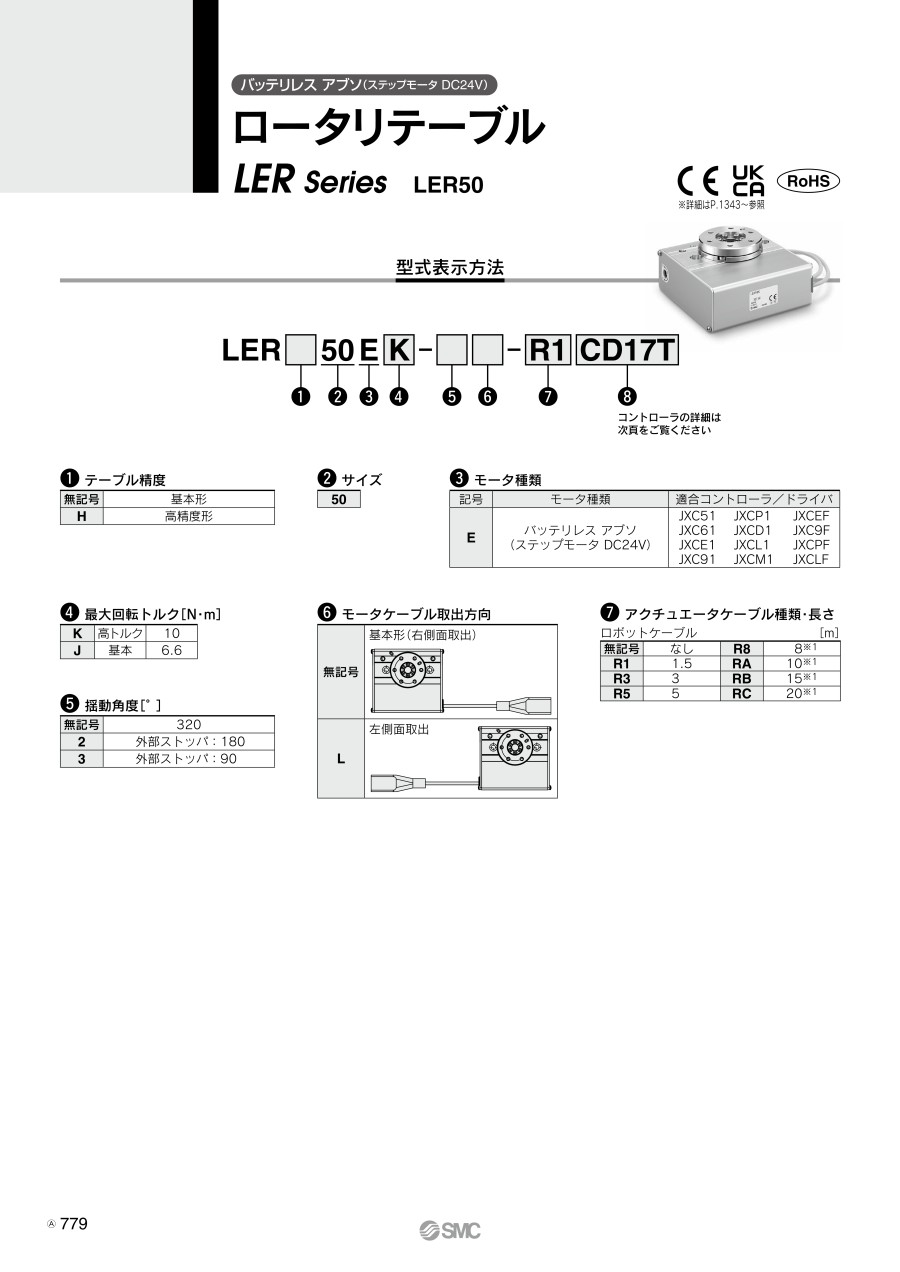
揺動角度 A
- 90°
- 外部ストッパ:90°
- 180°
- 外部ストッパ:180°
- 310°
- 320°
トルク2(N・m)
~mm- 0.22
- 0.32
- 0.8
- 1.2
- 6.6
- 10
サイズ
~mm- 10
- 30
- 50
モータケーブル取出方向
アクチュエータケーブル種類
アクチュエータケーブル長さ(m)
~mm- 1.5
- 3
- 5
- 8
- 10
- 15
- 20
I/Oケーブル長さ、通信プラグ(m)
CAD
- 2D
- 3D
出荷日
- すべて
- 6日以内
- 19日以内
電動ロータリテーブル LERシリーズ



- 単価(税別)
- -円
- 合計(税別)
- -円(税込価格:-円)
- 出荷日
- -(参考出荷日:-円)
商品情報
外形図
単位:mm

LER□10□(揺動角度:310°)

LER□10-2(揺動角度:180°)/LER□10-3(揺動角度:90°)
製品仕様

電動ロータリテーブル LERシリーズの外観
LER:基本形/LERH:高精度形
仕様
| 型番 | LER□10K | LER□10J | LER□30K | LER□30J | LER□50K | LER□50J | |||
|---|---|---|---|---|---|---|---|---|---|
| アクチュエータ仕様 基本形 | 揺動角度[°] | 310 | 320 | ||||||
| リード[°] | 8 | 12 | 8 | 12 | 7.5 | 12 | |||
| 最大回転トルク[N・m] | 0.32 | 0.22 | 1.2 | 0.8 | 10 | 6.6 | |||
| 押当てトルク40~50%[N・m]注1)注3) | 0.13~0.16 | 0.09~0.11 | 0.48~0.60 | 0.32~0.40 | 4.0~5.0 | 2.6~3.3 | |||
| 最大慣性モーメント [kg・m2]注2)注3) | LECP6/LECP1/LECPMJ JXCE1/91/P1/D1 | 0.0040 | 0.0018 | 0.035 | 0.015 | 0.13 | 0.05 | ||
| LECPA JXC73/83/93 | 0.027 | 0.012 | 0.10 | 0.04 | |||||
| 角速度[°/sec]注2)注3) | 20~280 | 30~420 | 20~280 | 30~420 | 20~280 | 30~420 | |||
| 押当て速度[°/sec] | 20 | 30 | 20 | 30 | 20 | 30 | |||
| 最大角加速度・角減速度[°/sec2]注2) | 3,000 | ||||||||
| バックラッシ[°] | 基本形 | ±0.3 | ±0.2 | ||||||
| 高精度形 | ±0.1 | ||||||||
| 繰返し位置決め精度[°] | 基本形 | ±0.05 | ±0.05 | ||||||
| 高精度形 | ±0.03 | ||||||||
| ロストモーション[°]注4) | 基本形 | 0.3以下 | 0.3以下 | ||||||
| 高精度形 | 0.2以下 | ||||||||
| 耐衝撃/耐振動[m/s2]注5) | 150/30 | ||||||||
| 駆動方式 | 特殊ウォームギヤ+ベルト駆動 | ||||||||
| 最高使用頻度[c.p.m] | 60 | ||||||||
| 使用温度範囲[℃] | 5~40 | ||||||||
| 使用湿度範囲[%RH] | 90以下(結露なきこと) | ||||||||
| 質量[kg] | 基本形 | 0.49 | 1.1 | 2.2 | |||||
| 高精度形 | 0.54 | 1.2 | 2.4 | ||||||
| 外部ストッパ形 | 揺動角度[°] | -2/アーム(1ヶ) | 180 | ||||||
| -3/アーム(2ヶ) | 90 | ||||||||
| 終端繰返し位置決め精度[°]/外部ストッパ時 | ±0.01 | ||||||||
| 外部ストッパ設定範囲[°] | ±2 | ||||||||
| 質量[kg] | -2/外部 アーム(1ヶ) | 基本形 | 0.55 | 1.2 | 2.5 | ||||
| 高精度形 | 0.61 | 1.4 | 2.7 | ||||||
| -3/外部 アーム(1ヶ) | 基本形 | 0.57 | 1.2 | 2.6 | |||||
| 高精度形 | 0.63 | 1.4 | 2.8 | ||||||
| 電気仕様 | モータサイズ | □20 | □28 | □42 | |||||
| モータ種類 | ステップモータ(サーボ DC24V) | ||||||||
| エンコーダ | インクリメンタルA/B相(800パルス/回転) | ||||||||
| 電源仕様[V] | DC24±10% | ||||||||
| 消費電力[W]注6) | 11 | 22 | 34 | ||||||
| 運転待機電力[W]注7) | 7 | 12 | 13 | ||||||
| 瞬時最大電力[W]注8) | 14 | 42 | 57 | ||||||
注1)押当て推力の精度はLER10:±30%(F.S.)、LER30:±25%(F.S.)、LER50:±20%(F.S.)となります。
注2)慣性モーメントにより、角加速度/角減速度・角速度が変動します。カタログ「慣性モーメント―角加速度・角減速度、実効トルク―角速度グラフ」にて確認してください。
注3)ケーブル長さ・負荷・取付条件等により、速度・推力は変化する場合があります。ケーブル長さ5mを超える場合は、速度・推力は5m毎に最大10%低下します。(15mの場合:最大20%減)
注4)往復動作の誤差を補正する場合の目安値になります。
注5)耐衝撃:落下式衝撃試験で、送りねじの軸方向および直角方向にて誤作動なし。(初期における値)
耐振動:45~2,000Hz 1掃引、送りねじの軸方向および直角方向にて誤作動なし。(初期における値)
注6)消費電力とは、コントローラ含む運転時の消費電力を示します。
注7)運転待機電力とは、コントローラ含む運転待機時の消費電力を示します。
注8)瞬時最大電力とは、コントローラ含む運転時の瞬時最大電力を示します。電源容量の選定時に使用してください。
テーブル揺動角度範囲


外部ストッパ:180°仕様

外部ストッパ:90°仕様
※図は原点位置を示す。
注1)原点復帰動作等により、テーブルが可動する範囲です。周辺にあるワーク・設備等と干渉しないようにご注意ください。
注2)原点復帰後の位置です。外部ストッパの有無で位置が異なります。
注3)( )は原点復帰方向を変更した場合です。
構造

電動ロータリテーブル LERシリーズ

外部ストッパ形

基本形

高精度形
| 番号 | 部品名 | 材質 | 備考 | |
|---|---|---|---|---|
| 1 | ボディ | アルミニウム合金 | アルマイト処理 | |
| 2 | サイドプレートA | アルミニウム合金 | アルマイト処理 | |
| 3 | サイドプレートB | アルミニウム合金 | アルマイト処理 | |
| 4 | ウォーム | ステンレス鋼 | 熱処理+特殊処理 | |
| 5 | ウォームホイール | ステンレス鋼 | 熱処理+特殊処理 | |
| 6 | ベアリングカバー | アルミニウム合金 | アルマイト処理 | |
| 7 | テーブル | アルミニウム合金 | - | |
| 8 | ジョイント | ステンレス鋼 | - | |
| 9 | ベアリングホルダ | アルミニウム合金 | - | |
| 10 | ベアリングオサエ | アルミニウム合金 | - | |
| 11 | 原点ボルト | 炭素鋼 | - | |
| 12 | プーリA | アルミニウム合金 | - | |
| 13 | プーリB | アルミニウム合金 | - | |
| 14 | グロメット | NBR | - | |
| 15 | モータプレート | 炭素鋼 | - | |
| 16 | 基本形 | 深溝玉軸受 | - | - |
| 高精度形 | 特殊軸受 | - | ||
| 17 | 深溝玉軸受 | - | - | |
| 18 | 深溝玉軸受 | - | - | |
| 19 | 深溝玉軸受 | - | - | |
| 20 | ベルト | - | - | |
| 21 | ステップモータ(サーボDC24V) | - | - | |
| 22 | テーブル | アルミニウム合金 | アルマイト処理 | |
| 23 | アーム | 炭素鋼 | 熱処理+無電解ニッケル処理 | |
| 24 | ホルダ | アルミニウム合金 | アルマイト処理 | |
| 25 | アジャスタボルト | 炭素鋼 | 熱処理+クロメート処理 | |
規格表
| 型番 | 揺動角度 | H1 | H2 | H3 |
|---|---|---|---|---|
| LER10 | 310° | 10 | 3.5 | - |
| 180° | 10 | 3.5 | 9 | |
| 90° | 10 | 3.5 | 9 | |
| LERH10 | 310° | 17 | 10.5 | - |
| 180° | 17 | 10.5 | 16 | |
| 90° | 17 | 10.5 | 16 |
注意・禁止事項
設計上のご注意/選定について
- ※ 負荷変動、上昇・下降動作、摩擦抵抗の変化がある場合には、考慮した安全設計を行ってください。作動速度が上昇し人体ならびに機器、装置に損傷を与える原因となります。
- ※ 停電等で押当て推力が低下する場合がありますので、考慮した安全設計を行ってください。クランプ機構に電動ロータリテーブルを使用する場合、停電等でクランプ力が減少しワークが外れる場合がありますので、人体や機械装置に損傷を与えない安全装置を組込んでください。
- ※ 作動速度が速く、負荷の慣性が大きい場合には、破損の原因となります。機種選定手順により、適正は条件にて設定してください。
- ※ 揺動角度の繰返し精度が必要な場合は、外部ストッパ付(180°±2°、90°±2°)を使用するか外部で負荷を直接押当て運転にて停止させてください。
- ※ 外部ストッパ付および外部で負荷を直接停止させる場合には必ず【押当て運転】を使用してください。位置決め運転および位置決め運転範囲で、外部接触をさせないでください。
取り付けについて
- ※ 取付時に電動ロータリテーブルを落下させたり、ぶつけたりして傷や打痕をつけないよう注意してください。わずかな変形でも精度の劣化や作動不良の原因となります。
- ※ 負荷の取付時のねじ締付は、制限範囲内のトルク値で適正に締付けてください。制限範囲以上の値による締付は作動不良の原因となり、締付不足の場合は位置ずれ等の原因となります。
- ※ 電動ロータリテーブル取付時のねじ締付は、制限範囲内のトルク値で適正に締付けてください。制限範囲以上の値による締付は作動不良の原因となり、締付不足の場合は位置ずれ等の原因となります。
■テーブルへの負荷取付方法
負荷は、テーブルの取付用めねじにボルトなどを用い、下表の締付トルクで適正のねじ長にて取付けてください。ねじが長くボディ本体に干渉すると、作動不良の原因となります。
| 型番 | 使用ボルト | ねじ長さ [mm] | 最大締付トルク [N・m] |
|---|---|---|---|
| LER□10 | M4×0.7 | 6 | 1.4 |
| LER□30 | M5×0.8 | 8 | 3.0 |
| LER□50 | M6×1 | 10 | 5.0 |
- ※ 上記以外の製品情報につきましては、カタログを参照下さい。
- ※ 商品画像は代表画像となっております。
型番リスト
| 型番 |
|---|
通常単価(税別)
(税込単価) | 通常出荷日 |
|---|
38,020円 ( 41,822円 ) | 6日目 |
46,677円 ( 51,345円 ) | 6日目 |
52,526円 ( 57,779円 ) | 19日目 |
56,004円 ( 61,604円 ) | 19日目 |
95,881円 ( 105,469円 ) | 19日目 |
74,616円 ( 82,078円 ) | 19日目 |
75,951円 ( 83,546円 ) | 19日目 |
107,917円 ( 118,709円 ) | 19日目 |
79,253円 ( 87,178円 ) | 19日目 |
83,452円 ( 91,797円 ) | 19日目 |
107,077円 ( 117,785円 ) | 19日目 |
122,962円 ( 135,258円 ) | 19日目 |
113,421円 ( 124,763円 ) | 19日目 |
116,419円 ( 128,061円 ) | 19日目 |
185,063円 ( 203,569円 ) | 19日目 |
50,961円 ( 56,057円 ) | 19日目 |
71,992円 ( 79,191円 ) | 19日目 |
69,703円 ( 76,673円 ) | 19日目 |
105,273円 ( 115,800円 ) | 19日目 |
52,661円 ( 57,927円 ) | 19日目 |
71,736円 ( 78,910円 ) | 19日目 |
94,118円 ( 103,530円 ) | 19日目 |
75,062円 ( 82,568円 ) | 19日目 |
46,677円 ( 51,345円 ) | 19日目 |
80,595円 ( 88,655円 ) | 19日目 |
92,061円 ( 101,267円 ) | 19日目 |
75,807円 ( 83,388円 ) | 19日目 |
52,661円 ( 57,927円 ) | 19日目 |
89,673円 ( 98,640円 ) | 19日目 |
46,677円 ( 51,345円 ) | 6日目 |
120,120円 ( 132,132円 ) | 19日目 |
65,191円 ( 71,710円 ) | 19日目 |
82,109円 ( 90,320円 ) | 19日目 |
78,230円 ( 86,053円 ) | 19日目 |
99,055円 ( 108,961円 ) | 19日目 |
76,178円 ( 83,796円 ) | 19日目 |
109,721円 ( 120,693円 ) | 19日目 |
65,390円 ( 71,929円 ) | 19日目 |
66,004円 ( 72,604円 ) | 19日目 |
87,689円 ( 96,458円 ) | 19日目 |
69,703円 ( 76,673円 ) | 19日目 |
52,661円 ( 57,927円 ) | 19日目 |
103,628円 ( 113,991円 ) | 19日目 |
70,911円 ( 78,002円 ) | 19日目 |
74,481円 ( 81,929円 ) | 19日目 |
83,782円 ( 92,160円 ) | 19日目 |
46,677円 ( 51,345円 ) | 19日目 |
114,204円 ( 125,624円 ) | 19日目 |
61,853円 ( 68,038円 ) | 19日目 |
85,122円 ( 93,634円 ) | 19日目 |
84,255円 ( 92,681円 ) | 19日目 |
87,956円 ( 96,752円 ) | 19日目 |
38,020円 ( 41,822円 ) | 6日目 |
60,808円 ( 66,889円 ) | 19日目 |
66,088円 ( 72,697円 ) | 19日目 |
69,602円 ( 76,562円 ) | 19日目 |
59,048円 ( 64,953円 ) | 19日目 |
70,596円 ( 77,656円 ) | 19日目 |
71,938円 ( 79,132円 ) | 19日目 |
74,794円 ( 82,273円 ) | 19日目 |
詳細情報
基本情報
薄型のロータリーアクチュエータ。
【特長】
・繰り返し位置決め精度:±0.03°(高精度タイプ)
・ショックレス・高速駆動
・速度・加減速度・位置決め最大64点
・省エネ:テーブル停止後、電力40%自動低減
・ステップモータ(サーボ DC24V)
商品担当おすすめ



SMC
【在庫品多数】薄形シリンダ 標準形 複動・片ロッド CQ2シリーズ
薄形シリンダ、標準形:複動・片ロッド CQ2シリーズです。全長が薄形に設計された省スペースシリンダです。各種冶具や装置のコンパクト化を実現しているため最小限のスペースでワーク可能です。



よくあるご質問(FAQ)
ただし、外力による移動子の位置ズレで、アラームが発生する可能性があります。
また、ロック付の場合はロックケーブルをコントローラに接続し、[ ロック解除/BK RLS ]端子にDC24Vを加えてロックを行ったのちに,作業をおこなってください。アクチュエータを垂直方向とした状態で、ロックを解除すると移動子が自重落下する恐れがあります。ロック解除は十分に安全を確保した上で実施ください。
なお、コントローラを接続した状態で、移動子を手で動かすとモータの誘起電圧によりコントローラに影響を与える場合があります。手で動かす際は、コントローラのCN2(モータコネクタ)にアクチュエータケーブルを接続しないでください。
LECSとの組み合わせ使用にて原点センサーが必要な場合は、別途センサーを取り付けてください。
また、LECP/LECPAとの組み合わせ使用での原点復帰は、押当原点方式を採用していますので原点センサは不要です。
〔押当原点方式:テーブルをストロークエンドに押当て、その位置を原点基準とする方式〕
この商品を見た人は、こんな商品も見ています






最近見た商品
通常価格、通常出荷日が表示と異なる場合がございます

ロータリーアクチュエータカテゴリの売れ筋ランキング
通常価格、通常出荷日が表示と異なる場合がございます

SMC
ロータリテーブル ベーンタイプ 基本形 MSUBシリーズ
5通常価格(税別):25,692円~
通常出荷日:当日出荷可能在庫品1日目~

SMC
ロータリアクチュエータ ベーンタイプ CRBシリーズ
5通常価格(税別):12,262円~
通常出荷日:6日目~
SMC
ロータリテーブル ラックピニオンタイプ MSQシリーズ サイズ:1・2・3・7
4通常価格(税別):23,484円~
通常出荷日:当日出荷可能在庫品1日目~
SMC
ミニロータリアクチュエータ CRJシリーズ
0通常価格(税別):8,647円~
通常出荷日:当日出荷可能在庫品1日目~
SMC
ロータリアクチュエータ ベーンタイプ CRB2シリーズ
5通常価格(税別):9,685円~
通常出荷日:当日出荷可能在庫品1日目~
SMC
ロータリテーブル・ベーンタイプ 高精度形 MSUAシリーズ
5通常価格(税別):2,958円~
通常出荷日:6日目~
SMC
薄形ロータリアクチュエータ ラックピニオンタイプ CRQ2シリーズ
4.2通常価格(税別):11,421円~
通常出荷日:当日出荷可能在庫品1日目~
SMC
ロータリテーブル ラックピニオンタイプ MSQシリーズ サイズ:10~200
4通常価格(税別):1,280円~
通常出荷日:当日出荷可能在庫品1日目~
SMC
角度調整付ロータリアクチュエータ ベーンタイプ CRB2□WUシリーズ
0通常価格(税別):14,257円~
通常出荷日:当日出荷可能在庫品1日目~