メカニカル部品技術窓口
確定しました
ストローク調節機構
~mm- なし
シリンダ径(φ)
~mm- 32
ロッド径(φ)
~mm- 16
動作ストローク(mm)
~mm- 22
オプション
~mm- なし
角度
~mmセンサ・個数
~mm旋回センサ
~mmタイプ
~mmCAD
- 2D
- 3D
出荷日
- すべて
- 19日以内
ロボット周辺機器 精密反転ハンド BHSシリーズ



- 単価(税別)
- -円
- 合計(税別)
- -円(税込価格:-円)
- 出荷日
- -(参考出荷日:-円)
BHS-06AS-R2-ET2LS2の仕様・寸法情報
把持方法
挟むパラレルタイプ / 開くパラレルタイプ
フィンガの数
2本
種類
本体
本体形状
特殊形
環境・用途
標準
付加機能
高精度
ストローク調節機構
なし
シリンダ径(φ)
32
ロッド径(φ)
16
動作ストローク(mm)
22
オプション
なし
角度
180°
センサ・個数
無接点2芯L字・2個
旋回センサ
無接点2線式
商品情報
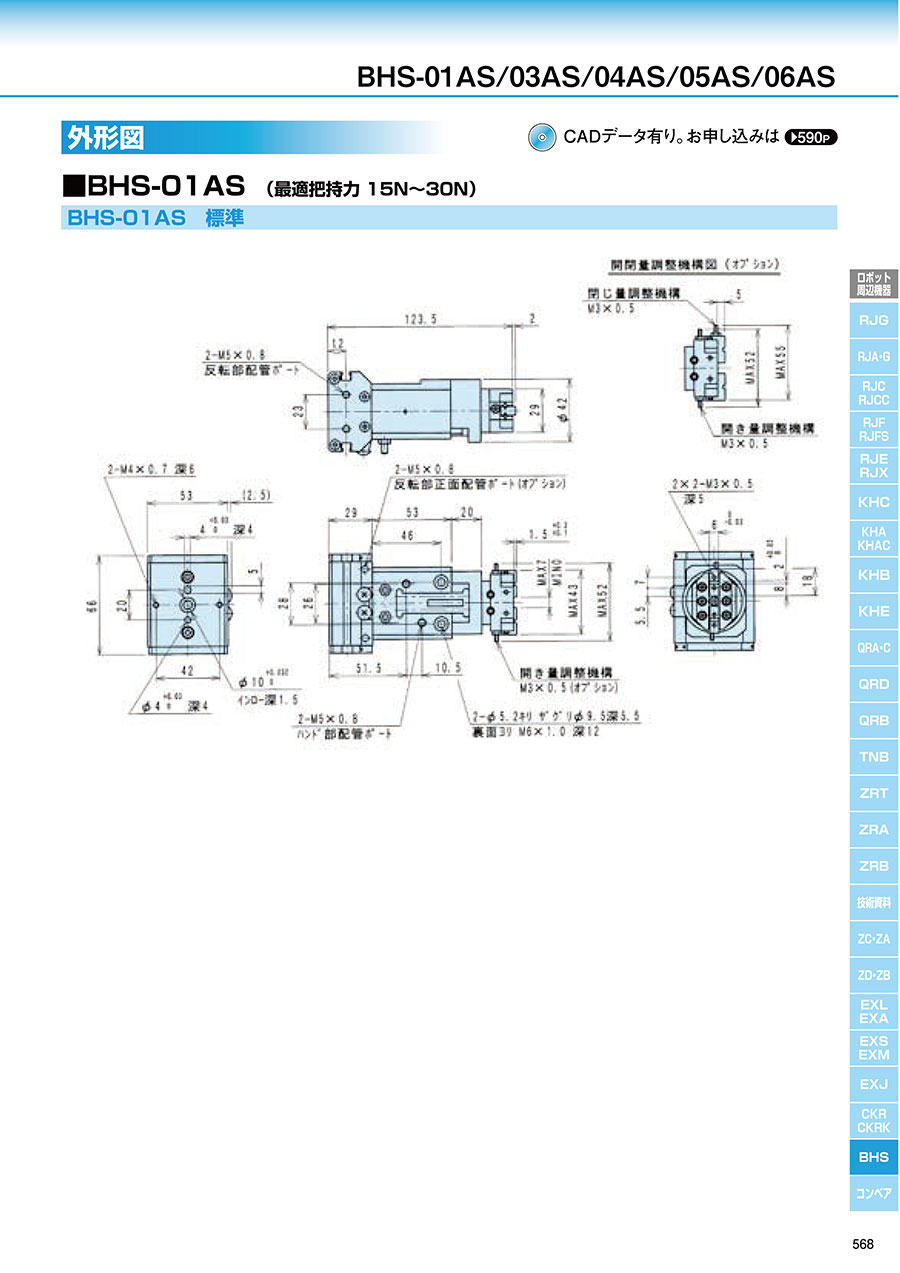
外形図
BHS-01AS 標準(最適把持力 15N~30N)

BHS-03AS 標準(最適把持力 30N~50N)

BHS-04AS 標準(最適把持力 40N~80N)

BHS-05AS 標準(最適把持力 80N~150N)

BHS-06AS 標準(最適把持力 100N~250N)

製品仕様
製品仕様
| 型番 | BHS-01AS | BHS-03AS | BHS-04AS | BHS-05AS | BHS-06AS |
|---|---|---|---|---|---|
| 駆動源 | エアー 0.3~0.7MPa | ||||
| 潤滑 | 無給油またはタービン油1種(ISOVG32) | ||||
| 周囲温度(℃) | 5~60 | ||||
| 動作ストローク(mm) | 7 | 10 | 14 | 16 | 22 |
| シリンダ径(mm) | φ12 | φ16 | φ20 | φ25 | φ32 |
| ロッド径(mm) | φ6 | φ8 | φ10 | φ12 | φ16 |
| 反転角度 | 90°、180° | ||||
| 反転トルク(N・m) | 1.72×P-0.2 | 1.72×P-0.2 | 3.40×P-0.7 | 6.36×P-1.2 | 11.12×P-1.2 |
| 反転精度(mm) | ±0.05 | ||||
| 繰り返し精度(mm) | ±0.01 | ||||
| 許容運動エネルギー(J) | 0.0025 | 0.0025 | 0.0052 | 0.0082 | 0.0128 |
| 本体質量(kg) | 0.66 | 0.71 | 1.23 | 1.90 | 3.20 |
※許容エネルギー範囲内でご使用ください。
■センサ仕様
| 型式 | ET3L | ET2L |
|---|---|---|
| 種類 | 無接点 | |
| 用途 | プログラマブルコントローラ、 リレー用 | プログラマブルコントローラ専用 |
| 電源電圧 | DC10~28V | - |
| 負荷電圧・電流 | DC30V以下、100mA以下 | DC10~30V、5~20mA |
| 消費電流 | DC24Vにて10mA以下(ON時) | - |
| 内部降下電圧 | 100mAにて0.5V以下 | 4V以下 |
| ランプ | 発光ダイオード(ON時点灯) | |
| 漏れ電流 | 10μA以下 | 1mA以下 |
| リード線長さ | 3m(耐油性ビニールキャブ タイヤコード3芯 0.15mm2) | 3m(耐油性ビニールキャブ タイヤコード2芯 0.15mm2) |
| 最大衝撃 | 100G | |
| 絶縁抵抗 | DC500Vメガ-にて、20MΩ以上 | |
| 絶縁耐圧 | AC1000V 1分間印加にて、異常なきこと | |
| 周囲温度 | -10~+60℃ | |
| 保護構造 | IEC規格IP67.JIS C0920(防浸形)、耐油 | |
商品特長詳細
内部構造図、パーツ・パッキンリスト

■パーツリスト
| No. | 名称 | 材質 |
|---|---|---|
| 1 | ロータリーボディ | アルミ |
| 2 | サイドプレート1 | アルミ |
| 3 | サイドプレート2 | アルミ |
| 4 | ベアリング押さえ | アルミ |
| 5 | ラック | ステンレス |
| 6 | ピストン | 樹脂 |
| 7 | ピニオン | ステンレス |
| 8 | ストッパプレート | 炭素鋼 |
| 9 | キー | 炭素鋼 |
| 10 | ストッパベース | 炭素鋼 |
| 11 | シリンダカバー | アルミ |
| 12 | 反転ボディ | アルミ |
| 13 | ハンドボディ | アルミ |
| 14 | ハンドシリンダ | アルミ |
| No. | 名称 | 材質 |
|---|---|---|
| 15 | アーム | ステンレス |
| 16 | マスタージョウ | ステンレス |
| 17 | ベアリングガイド | ステンレス |
| 18 | ハンドピストン | ステンレス |
| 19 | ロッドカバー | アルミ |
| 20 | クッション | - |
| 21 | 半月磁石 | - |
| 22 | パッキン | - |
| 23 | Oリング | - |
| 24 | Oリング | - |
| 25 | Oリング | - |
| 26 | 単列深溝玉軸受 | - |
| 27 | 支点軸 | 軸受鋼 |
| 28 | 作動軸 | 軸受鋼 |
| No. | 名称 | 材質 |
|---|---|---|
| 29 | ピストンシール | - |
| 30 | ロッドシール | - |
| 31 | シリンダシール | - |
| 32 | ロータリーシール | - |
| 33 | 磁石 | - |
| 34 | スプリングピン | - |
| 35 | 単列深溝玉軸受 | - |
| 36 | 単列深溝玉軸受 | - |
| 37 | C形止め輪 | ステンレス |
| 38 | 位置決めピン | 軸受鋼 |
| 39 | クロスローラ | - |
| 40 | ストッパボルト | - |
| 41 | ストッパナット | - |
| - | - | - |
■パッキンリスト
| No. | BHS-01AS | BHS-03AS | BHS-04AS | BHS-05AS | BHS-06AS |
|---|---|---|---|---|---|
| 22 | PSD-16 | PSD-16 | PSD-20 | PSD-25 | PSD-30 |
| 23 | S-4 | S-4 | S-4 | S-4 | S-4 |
| 24 | φ14×φ1 | φ14×φ1 | φ18×φ1 | φ22.3×φ1.02 | φ28×φ1 |
| 25 | S-10 | S-10 | S-14 | S-18 | S-22 |
| 29 | PSD-12 | PSD-16 | PSD-20 | PSD-25 | PSD-32 |
| 30 | MYA-6 | MYA-8 | MYA-10 | MYA-12 | MYA-16 |
| 31 | P-9 | P-12 | P-16 | P-21 | P-26 |
| 32 | P-12 | P-12 | P-15 | P-20 | P-20 |
性能・試験情報
性能データ
■把持力

供給圧力別(MPa)時においてハンドの爪の長さlにおける開方向、閉方向に作用する把持力を表します。

詳細情報
基本情報
【特長】
・精密作業に最適な反転ハンド。
・本体とシリンダが調整可能な分離構造により、回転軸精度±0.05mmを実現し、反転によるワーク芯ズレをおさえた高精度反転ハンド。
・回転に影響されない「ハンド開閉確認センサ」「配管」が固定式。
・オプションにハンド開閉調整機構・正面配管。
・わずらわしい組み合わせ設計が不要。
類似品類似品をすべて見る
この商品に近い類似品がありませんでした。ロボット周辺機器 精密反転ハンド BHSシリーズの型番BHS-06AS-R2-ET2LS2のページです。
型番BHS-06AS-R2-ET2LS2に関する仕様情報を記載しております。
ロボット周辺機器 精密反転ハンド BHSシリーズのレビュー
この商品のレビューはありません
この商品を見た人は、こんな商品も見ています






よく一緒に購入される商品


最近見た商品
通常価格、通常出荷日が表示と異なる場合がございます

ハンド・チャックカテゴリの売れ筋ランキング
通常価格、通常出荷日が表示と異なる場合がございます

SMC
薄形エアチャック MHF2シリーズ
4.7通常価格(税別):77円~
通常出荷日:当日出荷可能在庫品1日目~

SMC
平行開閉形エアチャック 標準タイプ MHZ2シリーズ
4.5通常価格(税別):381円~
通常出荷日:当日出荷可能在庫品1日目~
SMC
平行開閉形エアチャック 2爪 ロングストローク 薄型・軽量 MHZL2シリーズ
4通常価格(税別):381円~
通常出荷日:当日出荷可能在庫品1日目~
SMC
支点開閉形エアチャック 標準タイプ MHC2シリーズ
4通常価格(税別):782円~
通常出荷日:当日出荷可能在庫品1日目~
SMC
180°開閉形カム式エアチャック MHY2シリーズ
5通常価格(税別):369円~
通常出荷日:当日出荷可能在庫品1日目~
SMC
平行開閉形エアチャック 2爪 ダストカバー付 MHZJ2シリーズ
5通常価格(税別):381円~
通常出荷日:当日出荷可能在庫品1日目~
SMC
平行開閉形エアチャック 3爪 MHS3シリーズ
5通常価格(税別):29,506円~
通常出荷日:当日出荷可能在庫品1日目~
マシンエンジニアリング
MEPAC 平行開閉チャック エコタイプ
4通常価格(税別):12,625円~
通常出荷日:当日出荷可能在庫品1日目~
ミスミ
小型平行チャック
3.7通常価格(税別):10,390円~
通常出荷日:当日出荷可能在庫品1日目